Es una flecha que une el origen de un punto con un sistema carteciano.representar una magnitud física el cual necesita de un módulo y una dirección (u orientación) para quedar definido. Se representa como un segmento orientado, con una dirección, dibujado de forma similar a una "flecha". Su longitud representa el modulo del vector y la "punta de flecha" indica su dirección.

"SUMA DE VECTORES"
Para sumar dos vectores libres (vector y vector) se escogen como r epresentantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector.
epresentantes dos vectores tales que el extremo final de uno coincida con el extremo origen del otro vector. "MÉTODO DEL PARALELOGRAMO"
Consiste en disponer gráficamente los dos vectores de manera que los orígenes de ambos coincidan en un punto, completando un paralelogramo trazando rectas paralelas a cada uno de los vectores, en el extremo del otro . El resultado de la suma es la diagonal del paralelogramo que parte del origen común de ambos vectores.
"FÓRMULA ALGEBRAICA"
a=(ax,ay)
b=(bx,by)
a+b=(ax+bx,ay+by)
"RESTA DE VECTORES"
La suma y resta de vectores se realiza sumando o restando cada una de las componentes de cada uno y da como resultado otro vector.
a=(ax,ay)
b=(bx,by)
a-b=(ax-bx,ay-by)
V1 = (x1, y1)V2 = (x2, y2)V1 + V2 = (x1, y1) + (x2, y2) = (x1 + x2, y1+ y2)
Para sumar dos vectores, los mismos tienen que tener la misma cantidad de componentes.
Ejemplo:V1 = (1, 4, 2) V2 = (0, 2, 1)
V1 + V2 = (1, 4, 2) + (0, 2, 1) = (1, 6, 3)
V1 - V2 = (1, 4, 2) - (0, 2, 1) = (1, 2, 1)
Gráficamente la suma y resta de vectores se puede realizar por el método del paralelogramo, es decir trazar sobre cada vector una recta paralela al otro formando un paralelogramo, cuya diagonal es la suma.
"MULTIPLICACIÓN DE UN VECTOR POR UN ESCALAR"
El producto de un escalar por un vector da por resultado otro vector, con la misma dirección que el primero. Al hacer la multiplicación, el escalar cambia el módulo del vector (gráficamente el largo) y en caso de ser negativo cambia también el sentido. La dirección del vector resultado es siempre la misma que la del vector original.Matemáticamente se realiza multiplicando al escalar por cada una de las componentes del vector.
Por ejemplo: Si un vector tiene 2 coordenadas:
V = (x, y)k V = k (x, y) = (kx, ky)
Ejemplo:V = (2,1)k = 2k V = 2 (2, 1) = (4, 2)
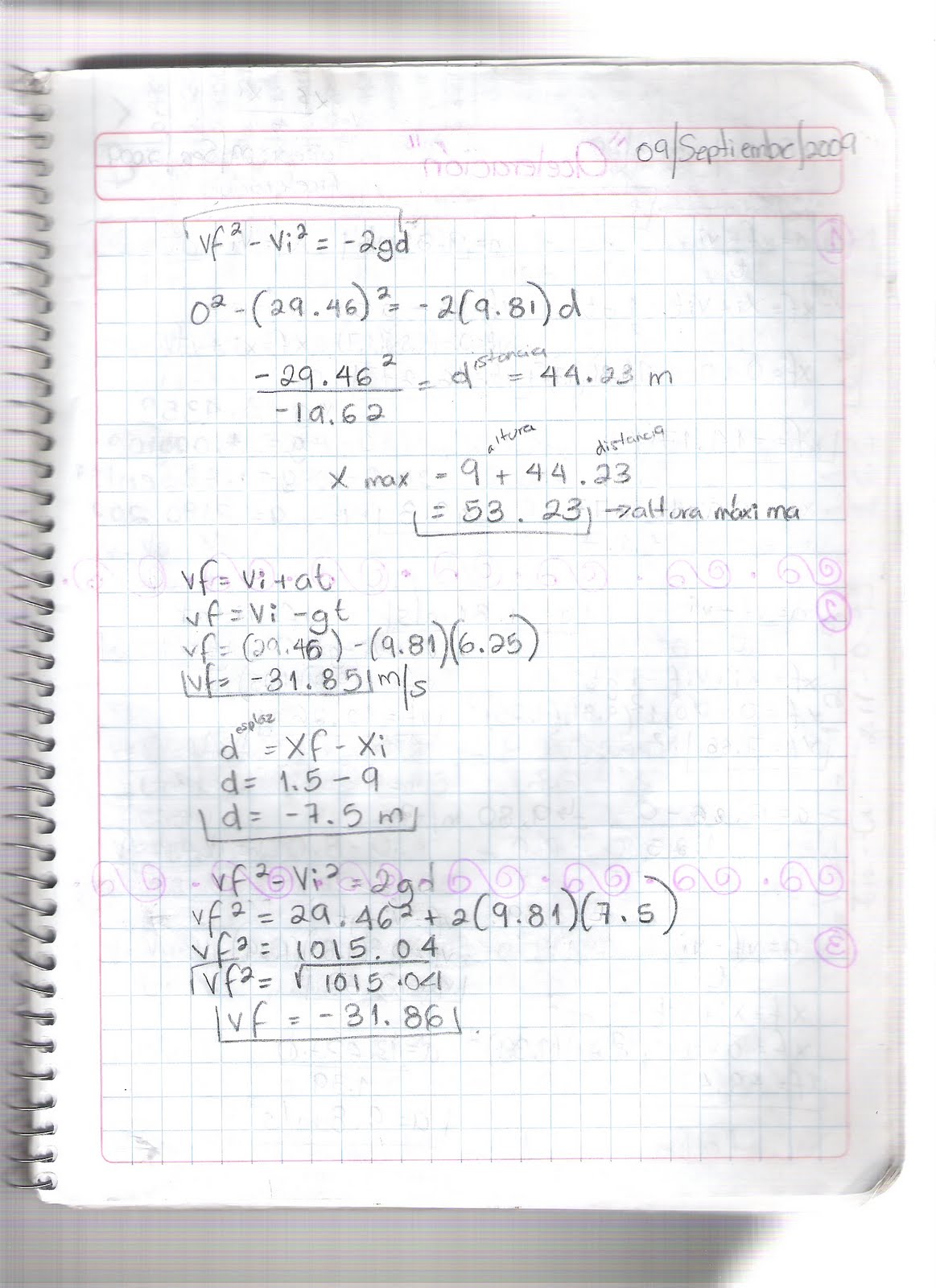
" EJERCICIOS"



 La ciencia contemporánea, se divide en el estudio de los seres vivos y en el estudio de los objetos sin vida, es decir, en las ciencias de la vida y en las ciencias físicas. Las ciencias de la vida se dividen en áreas como la biología, la zoología, etc. Las físicas en áreas como la geología, la astronomía, la química y la física.
La ciencia contemporánea, se divide en el estudio de los seres vivos y en el estudio de los objetos sin vida, es decir, en las ciencias de la vida y en las ciencias físicas. Las ciencias de la vida se dividen en áreas como la biología, la zoología, etc. Las físicas en áreas como la geología, la astronomía, la química y la física.















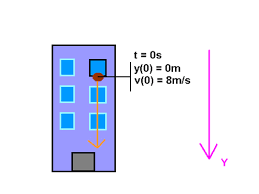













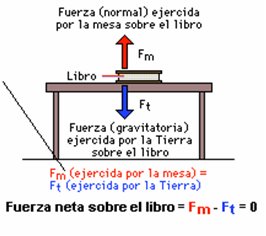
 Un diagrama de cuerpo libre es una
Un diagrama de cuerpo libre es una 












{kind=link}
{kind=link}